
LiDAR은 자율주행차에 중요한 센서입니다 LiDAR는 레이저광을 사용하여 주변을 스캔하여 바깥 세계의 3D 이미지를 만듭니다. 반사신호를 이용하여 LiDAR는 주위의 다양한 물체의 모양과 어두운 곳에서도 그들과의 거리를 1 센티미터까지 감지합니다. 또 자율주행차가 만드는 3D 영상과 그 안에 내장된 3D 지도를 비교해 도로 위치를 정확하게 파악할 수 있습니다.
Yandex 저희는 올해 봄에 독자적으로 LiDAR를 만들기 시작했고 9개월 후 도시권 최초로 LiDAR를 장착한 자율주행차 테스트를 시작했습니다 2년간의 개발 이후로, 11월 23일, 우리는 우리의 자사 소프트웨어 정의 LiDAR을 메인 센서로 사용하기로 완전히 전환하였습니다. 4세대 자동차에는 이미 탑재되어 있으며, 이들은 우리의 새로운 모든 차에 포함될 예정입니다. 이번시간에는LiDAR의주요특징을자세히설명하고,자율운전기술발전에대한독점센서가왜이렇게중요한지살펴봅니다.

Yandex 일단 소프트웨어 정의 LiDAR가 뭘까요? 당면 과제와 교통상황에 따라 빔 수, 화각(angle of view), 측정범위 등의 매개변수를 미리 바꾸거나 차량이 이동 중에 변경할 수 있는 센서입니다. 예를 들면, 이 센서는 주택가의 안뜰을 통해서 이동할 때에, 차량 근처 지역의 포인트 클라우드 밀도를 높이거나 고속도로에서 고속 주행할 때의 범위를 늘리거나 할 수 있습니다. 이 기능은 알고리즘이 오브젝트 인식의 일정 수준의 불확실성을 보고하는 영역에서 해상도를 높이는 보다 복잡한 문제에 사용할 수 있습니다.

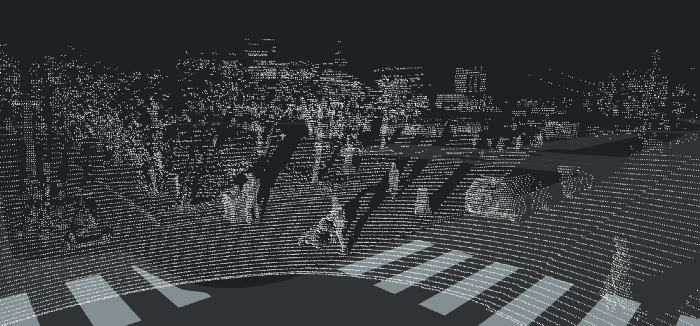
좁은 골목길에서 넓은 고속도로로 이동하는 차 LiDAR 는 클로즈업에서 장거리 스캔 패턴으로 바뀝니다. 이로써시스템이멀리있는물체를더자세히볼수있게만들어줍니다.당사의 LiDAR는 소프트웨어 정의 특성상 감지 범위나 해상도와 같은 고정된 필수 매개 변수가 없습니다. 레이저와 스캔 시스템의 매개 변수를 변화시켜 모든 방향에서 최대 500m 범위와 0.1해상도에 도달할 수 있습니다. 이는 각 상황에 가장 적합한 스캔 특성을 선택함으로써 실시간으로 LiDAR의 스캔 패턴이 변경될 수 있음을 의미합니다.
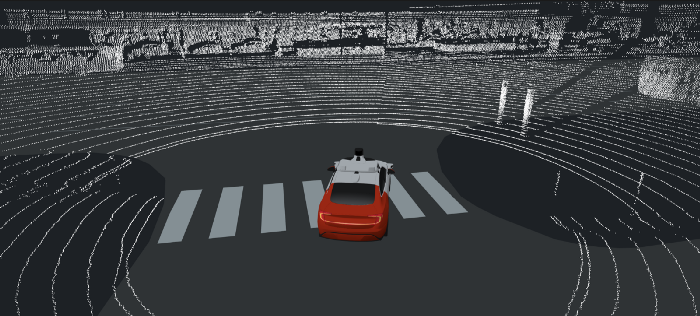
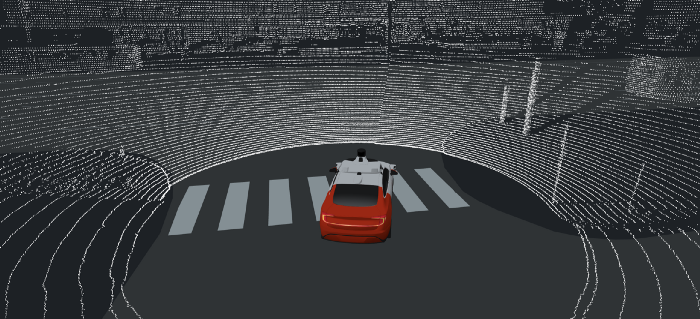
그래서 보행자들이 다니는 활발한 좁은 도로를 주행할 때 대부분의 광선을 차량 앞 도로에 집중시킬 수 있기 때문에 가까운 물체 인식을 위한 구름의 밀도를 크게 높일 수 있습니다. 반면 넓은 고속도로에서는 멀리 있는 것을 보는 것이 더 중요합니다. 설정을 변경함으로써 원하는 구역의 밀도가 높아져 200m 거리의 승용차나 500m 거리의 트랙터 트레일러를 인식할 수 있게 됩니다. 이 범위는 넓은 간선도로, 고속도로, 고가도로 등 도로인근 개발밀도가 높지 않은 지역으로 LiDAR 로컬패스(localization) 알고리즘의 지원을 받아 차량의 지역화에도 중요합니다.이 비디오에는 메인 LiDAR 사용에 대한 소프트웨어 정의 접근법을 간단히 보여 줍니다. 동영상의 스타트 부분에서, 표준적인 스캔 패턴을 사용하는 시스템을 볼 수 있습니다. 차량이 보행자로 가득한 좁은 골목으로 들어가면 시스템이 클로즈업 스캔 패턴으로 전환됩니다. 나중에 차가 커서 다차선 고속도로에 정차할 때, 시스템은 먼 곳의 것을 더 식별하기 위해 장거리 스캔 패턴으로 이동합니다. 이 비디오는 중앙의 LiDAR로만 보이는 점구름을 묘사하고 있습니다. 자율주행차마다 차량의 바로 앞이나 옆에 중소형 물체를 탐지할 수 있는 LiDAR가 추가 탑재되어 있습니다.
이런 종류의 매개변수 설정 유연성은 LiDAR의 스캐닝 시스템 설계를 통해 가능합니다. 또한 내부에는 회전 전자 소자가 없기 때문에 이전 회전 LiDAR를 사용할 때 발생한 열변형에 민감하지 않고 보다 안정적입니다. 우리의 솔리드 스테이트 LiDAR는 러시아 및 기타 대륙성 기후가 뚜렷한 다른 국가 및 지역의 연간 평균 기온 범위인 섭씨 영하 30도에서 실제 도로에서 동일하게 작동합니다.
Yandex 센서와 자율주행 기술스택이 세팅되어 있을 때 소프트웨어 정의방식을 이용할 수 있게 됩니다. 메인 센서의 제어는 소스 데이터 액세스, 전문 데이터 셋 수집 및 물론 가격 최적화와 같은 다른 이점도 제공합니다. 당사는 자사 LiDAR 개발에 많은 노력을 투자하였습니다. 그 결과, 3년도 지나지 않아 개념에서 여러모로 기존의 LiDAR를 능가하는 생산모델로 전환하면서 동일한 비용을 지출할 수 있었습니다. 당사는 실제 자율주행차의 LiDAR를 이용하여 가설과 개선점을 즉시 테스트함으로써 이러한 속도를 유지할 수 있었습니다. 지금까지 우리 차는 이미 우리 고유의 LiDAR를 사용하여 50만 킬로미터를 주행하며 기능성과 신뢰성을 입증해 왔습니다.
오늘 우리는 중요한 이정표를 세우고 새로운 LiDAR를 개발할 뿐만 아니라 우리의 LiDAR를 완벽하게 만들 것입니다. 우리는 이미 근거리 탐지를 위해 측면 LiDAR 시제품을 테스트하고 있으며, 자율주행 로봇용 LiDAR도 설계하고 있습니다. 우리 fleet에 독자적인 LiDAR를 사용함으로써 기술과 센서의 긴밀한 관계가 인상적인 능력으로 이어질 수 있다는 사실을 통해 확신을 갖게 되었고, 앞으로도 더 많은 돌파구와 의미 있는 개선이 이루어지기를 희망합니다.
▲끼어들기=요즘 Yandex에 대한 소식을 많이 전해드리는 것 같으면서 또 Yandex 뉴스를 전해드리고 있네요. ^^ 하지만 Level 4 자율주행기술 개발 기업이 보이고 있는 공통된 개발 방향과 일치하는 부분이 있어 오늘 공지사항을 알려드립니다.
LiDAR는 분명 자율주행기술의 발전으로 주목 받으며 성장하고 있는 기술입니다. 2020년 하반기에는 LiDAR 개발사의 기업공개가 많이 이루어졌습니다. 이러한 LiDAR 전문기업들이 주목 받고 있는 것과는 별개로, 실제로 대표적인 자율주행 개발사들은 자체적인 LiDAR 개발에 오래전부터 투자하였고 실제로 적용하여 사용하고 있습니다.
나름대로 알려진 대부분의 기업이 여기에 포함되어 있다고 할 수 있습니다. Waymo, Argo AI, Aurora, Cruise 뿐만 아니라 Camera 기반 ADAS 기술의 선두주자인 Mobileye도 현재는 Luminar LiDAR을 사용하고 있으나 2025년 자체 LiDAR 개발을 할 것이라고 공개하였습니다.
Yandex의 LiDAR 자체개발 소식은 이러한 배경에서 이해하시면 될 것 같습니다. 아무래도 필수센서에 대한 자체 기술확보를 통해 외부변수를 줄이기 위한 것으로 보입니다. 그리고 LiDAR의 높은 가격은 또 하나의 독자적인 LiDAR 개발에 필요성을 높인 것이라고 생각됩니다.
Tesla는 이전에 있던 사다리도 없애고, Camera만으로 주변을 인지하고 있습니다. 한편, Level 4 자율주행기술 개발 업체들은 기본적으로 Camera, LiDAR, Radar가 포함된 센서퓨전을 통해 보다 확실한 방법을 모색하고 있습니다. 물론 기술의 완성도도 차이가 있겠지만 양산되는 자동차와 테스트 중인 기술에 대한 비교 평가는 아직 이르다고 할 수 있습니다. 하지만 몇 년 안에 robotaxi가 늘어나면서 많은 사람들의 기대와 평가가 나오지 않을까 생각합니다.
PS: 검색에서 원하는 내용을 찾을 수 없다면 태그 또는 검색을 하면 더 많은 자료를 찾을 수 있습니다. 자율주행자동차 기반 미래 모빌리티 관련 자세한 문의나 강의는 [email protected]으로 연락주시기 바랍니다.
Over the Vehicle !!!
참고 자료 Lidar is an important sensor for self – driving cars . Lidars use laser light to scan their surroundings and create a 3D picture of the … medium.com