
자율주행 기술 현황=일반 대중에게 자율주행은 영화에 나오는 막연한 미래 기술로 인식됐지만 2014년 미국 구글사가 유튜브 채널에 공개한 구글카 동영상(Google Self-Driving Car Project, 2014)으로 세계적인 관심이 높아지면서 자동차 회사들의 기술개발 경쟁이 더욱 심화되는 계기가 됐다. 국내에서는 2016년 2월 12일 자동차관리법 제2조(정의) 1의 3에 ”자율주행자동차’라 함은 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차를 말한다’고 추가하여 ‘사람이 아닌 기계의 운전’을 공식적으로 인정했다는 측면에서 의미가 깊다. 또한 2020년 5월 1일 「자율주행자동차 상용화 촉진 및 지원에 관한 법률」을 제정하여 자율주행자동차의 도입 및 확산과 안전한 운행을 위한 기반 조성 및 지원에 필요한 사항을 규정하여 자율주행자동차의 상용화를 지원하고 있다.

[그림1 미래차산업 국가비전 선포식 (2019년 10월 15일)]자동차회사 중심의 자율주행 기술개발 추세인 해외와 달리 국내에서는 국가 차원의 기술개발 노력이 눈에 띈다. 2019년 10월 15일 ‘2030년 미래차 경쟁력 1등 국가 도약’이라는 비전과 ‘2027년 전국 주요 도로 완전 자율주행(레벨 4) 세계 최초 상용화’를 목표로 하는 ‘미래차 산업 국가비전 선포식’이 열렸다. 2027년까지 세계 최초 자율주행 수준 4(제한된 환경에서 완전 자율주행 가능)의 상용화를 달성하기 위해 국비 개선을 투입할 예정이라고 발표하고, 실제로 2020년에 국비 개선을 사용하는 사업단이 운영되고 있다.
자율주행기술 소개
[그림2 운전행위 절차(김현수, 2016)] 자율주행을 ‘기계에 의한 운전’이라고 생각할 때 사람이 운전할 때와 비교하면 이해하기 쉽다. 일반적으로 사람의 운전자는 자신의 앞뒤 양 옆에 있는 차량을 주시하며 차선을 유지한다. 1차적으로는 인접하는 차량에 대해서만 주의를 기울이지만, 실제로 앞차의 앞차, 그 앞차 등 주변 차량에 대해서도 주시하고 있다. 또, 이동하는 도로구간의 특성에 따라 설치되어 있는 제한표지, 주의표지, 방향표지 등을 육안확인하면서 운전한다. 예를 들어 맨 앞차가 브레이크를 밟으면 그 뒤 모든 차는 순서대로 또는 더 빨리 브레이크를 밟는다. 이 과정은 운전자가 눈으로 앞차와의 거리 변화를 ‘인지’하고, 감속의 필요성을 ‘판단’해 감속 ‘제어’하는 일련의 과정이다. 자동운전은 차량에 설치된 센서를 이용하여 주변차량의 위치, 표지판(제한표지, 주의표지, 방향표지 등), 도로환경을 인지한다. 인지된 정보를 통해서 주행을 위한 최적의 판단과 가감속 또는 차선변경과 같은 제어를 실행한다.

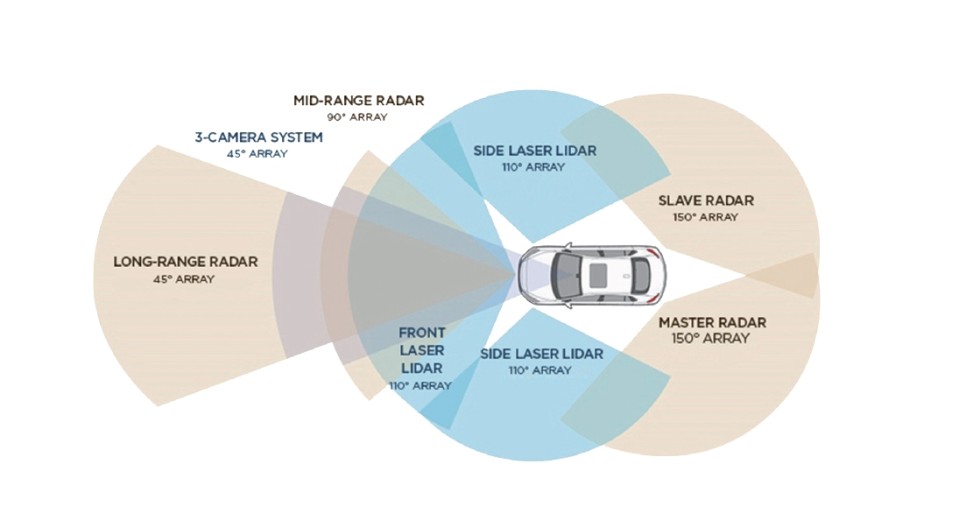
[그림3 현대자동차 자율주행 센서 구성(현대차 그룹 홈페이지)] 자율주행 차량 센서로 영상, 레이더, 라이더 센서가 가장 많이 활용되고 있다 레이더(RAdio Detection And Ranging) 센서는 전파를 발생시켜 물체에 부딪혔다 돌아온 반사파의 시간차 및 각도를 이용해 거리, 속도, 각도를 인지하는 센서로 현재 가장 많이 활용되고 있다. 영상센서는 사람의 눈과 같은 원리로 아직 정확도가 떨어지지만 물체의 모습을 인지할 수 있어 가격이 싸게 발전할 가능성이 높다. 라이더(Lidar, light와 radar의 합성어) 센서는 레이더 센서에서 전파 대신 레이저를 사용하는 것으로서 고정밀도 3차원이나 가능하지만 비싸고 내구성이 떨어진다. 초음파 센서는 작고 저렴하다는 장점으로 자동 주차와 같은 근거리 인지에 활용되고 있다. 그림3은 현대자동차 자율주행센서 구성과 감지영역을 보여준다.
자율주행센서의 한계 및 동적 정보
[그림4LDM 레이어 도식화 (Sh imada, H. etal. 2015)]
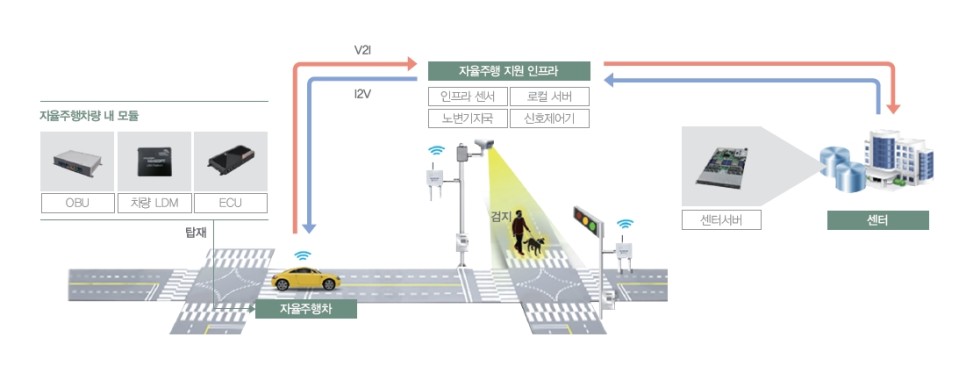
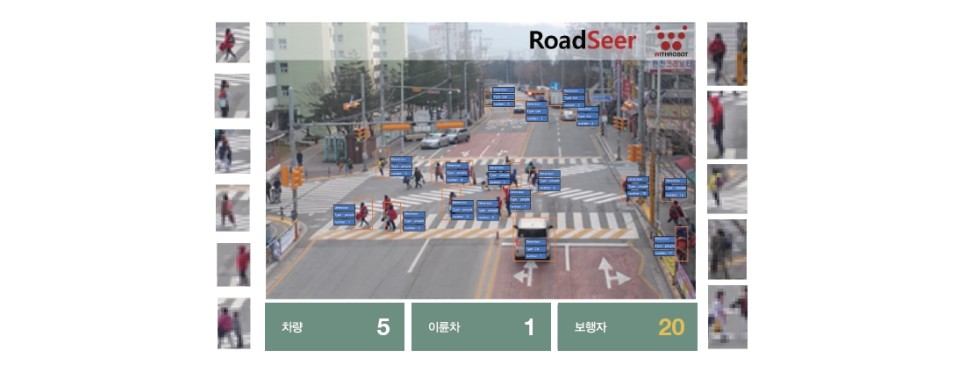
[그림5 독립 자율주행 인프라 지원시스템] 독립 자율주행(Stand-alone automated driving)에서의 센서의 역할은 사람의 운전자의 눈과 같지만 어떠한 이유로 방해된다면 정상적인 주행은 불가능할 것이다. 스스로 해결하기 어려운 상황에서 도로 인프라의 지원을 받아 방해를 극복한다면 안전 측면에서 큰 기여를 할 것이다. 대표적인 센서 한계 상황은 첫째, 차량 센서 인지 사각지대 발생이다. 차량센서 영역 내에서 물체(대형 차량, 가로수 등)에 가려짐으로써 발생하는 사각지대의 이동체(보행자, 이륜차, 전동킥보드)는 인지하기 어렵다. 이럴 경우 도로 인프라에서 도로반사경처럼 다른 각도에서 사각지대의 위험요소가 있는지를 알려주면 한계를 극복할 수 있다. 둘째, 「차량 센서 인지 범위 초과」이다. 교차로 대기 행렬, 정차 차량, 측방 접근 차량 등의 위치는 센서 인지 범위(일반적으로 전방 100m, 측후방 50m)를 초과하기 때문에 차선 변경과 같은 사전 대응이 어려워진다. 이 경우, 인프라 센서를 활용해 차량 센서의 범위 외의 상황 전달이 가능하다. 셋째, 비정상 도로 차단시설인지 혼란이다. 예를 들어 공사구간의 임시차선 유도시설은 너무 다양하고 정형화가 부족해 센서가 혼란스럽다. 이 경우 상대적으로 높은 위치의 인프라 센서를 통해 공사구간 위치정보를 전달하면 공사구간에서 겪을 수 있는 위기를 극복할 수 있을 것이다.자율주행 시에 접할 수 있는 도로환경에서 차량 스스로 해결하기 어려운 상황에 직면할 때 도로 인프라의 지원을 받아 위기를 극복할 수 있다. 결국 차량 주변 이동체의 실시간 동적 정보를 끊김 없이 탐지할 수 있도록 지원해야 한다.Local Dynamic Map(LDM)은 국제표준(ISO 18750, ETSI 302895)에서 정보의 시공간 분류에서 정의된 개념으로 지도, 도로 상황, 차량 관련 정보를 공간적 위치와 유효한 기간을 규격화하여 표현하는 기술이다. 일반적으로 LDM은 시공간 정도에 따라 레이어 1부터 레이어 4까지로 나뉘는데, 레이어 4에 해당하는 정보를 동적 정보라고 한다. 그림 4는 LDM 레이어를 설명하기 위한 그림이다.자율주행에 필요한 다양한 정보 가운데 LDM에서 레이어 4에 해당하는 정보는 빠르게 변화하는 차량 주변의 이동체 위치정보를 안정적으로 제공할 수 있다. 자동 운전 차량에 있어서는, 정보의 신뢰도, 중복 구분의 문제가 있어, 차량간의 공유 방식만으로는 곤란하기 때문에, 인프라가 개입된 정보의 공유가 필요하다.
독립 자율주행지원인프라 시스템

[그림6 인프라 센서로 이동 몸 추적 과정]
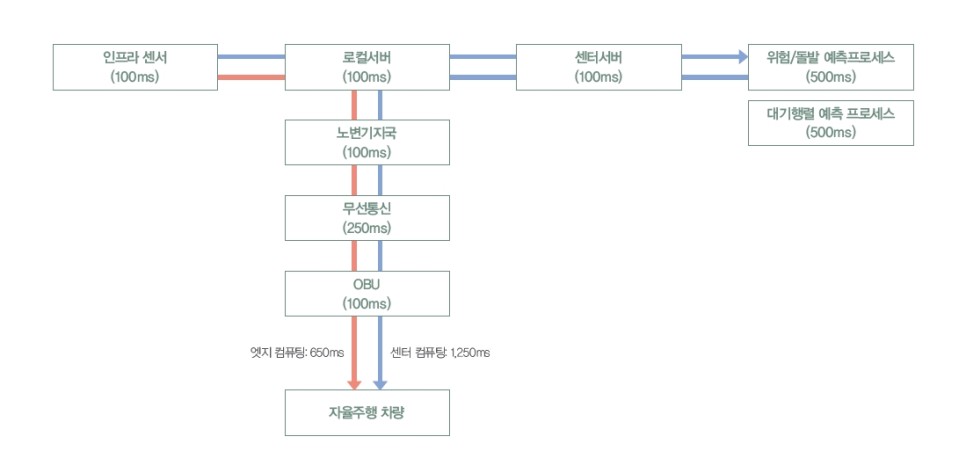
[그림7 인프라 센서 동적 정보 전달 성능]안전한 자율주행환경을 구축하기 위해 도로 인프라에서 동적정보를 추출해 차량에 제공하는 독립 자율주행 인프라 지원시스템을 구축했다. 도로에 설치된 이동체 감지시스템이 동적정보를 추출해 차량에 제공하면 자율주행 중의 센서 사각지대에서 인지되지 않은 이동체를 인지하게 된다. 그림 5는 독립적인 자율주행 핸디캡 극복을 위한 인프라 지원 시스템의 구성을 나타내고 있다.독립 자율주행 인프라 지원시스템의 성능을 검토하기 위해 사각지대의 이동체를 감지해 차량에 전달하는데 발생하는 전송소요시간을 산정했다. 그림 7은 각 모듈별 소요 시간을 산정하여 총시간을 계산한 것이다.엣지 컴퓨팅으로 사각의 이동체동적 정보를 전달하는 데 0.65초, 센터 분석 과정을 거쳐 전달하는 데 1.25초가 걸렸다. 골목길에서 갑자기 아이가 튀어나올 때, 사람의 운전자가 인지하고 정지하는 데 걸리는 시간을 1초 정도로 봤을 때 실험에서 얻은 0.65초는 의미 있는 수치로 판단된다.
향후 전망=현재 기술개발 중인 자율주행은 독립 자율주행으로 모든 상황을 차량 스스로 해결해야 하기 때문에 인프라 지원이 가능하다면 스스로 극복하기 어려운 핸디캡 상황에서 안전하게 주행할 수 있을 것이다. 자율주행기술이 지속적으로 발전하면 협력 자율주행이 가능해져 인프라 지원 또는 주도에 의한 안전하고 효율적인 자율주행을 예상한다.
출처 : 2021.Vol.05KICTzine
김형수 도로교통연구본부 연구위원
※ 이 책은 ‘도심도로 자율협력주행 기반 안전·인프라 연구’ 과제를 바탕으로 작성했다.
참고자료 GoogleSelf-DrivingCar Project(2014) A FirstDrive.Retrived from https://www.youtube.com/watch ? v= CqSDWoAh vLU. 김현수(2016). 자율주행 지원을 위한 도로 인프라 개선책. 국토, 6월호, 국토연구원, pp.25-30.·현대자동차그룹(n.d.) 도심자율주행, https://www.hyundai.co.kr/TechInnovation/Autonomous/Cdp.hub. ·Shimada, H., Yamaguchi, A., Takada, H. and Sato, K.(2015) Implementation and Evaluation of Localuation of Localuation Dynamic Mapin Safety Driving