다음 로봇관련 포스팅에서는 아마존 로봇에 대해 3회에 걸쳐 포스팅하고자 합니다. 그러기 위해서는 미리 모바일 로봇의 일종인 AGV와 AMR에 대해 알아야 하기 때문에, 이번 포스팅에서는 모바일 로봇의 종류에 대해 먼저 포스팅하겠습니다.
대부분의 산업용 로봇 팔은 한정된 공간 내에서 이기더라도 어느 정도 자유성을 가지고 여러 지점에 접근하는 동작이 가능하지만 로봇 자체는 한 곳에 고정되어 이동할 수 없도록 설계되어 있습니다.
한편 로봇자체가 주변환경에서 이동할 수 있는 능력을 가지며, 하나의 물리적 위치에 고정되어 있지 않은 경우를 이동형 로봇, 즉 모바일 로봇(Mobile Robot)이라고 합니다.
국제표준화 기구 ISO에서는 모바일 로봇을 ‘자율통제 하에서 이동할 수 있는 로봇’으로 정의하였는데, 가정용 로봇청소기나 산업용 AGV, AMR 등이 가장 대표적인 모바일 로봇이며, 공항 등의 안내 로봇, 식당 등의 서빙 로봇도 모바일 로봇을 기반으로 응용 기능을 추가하여 활용되는 로봇입니다.

AGV인 아마존의 Kiva(왼쪽)와 AMR인 MiR의 MiR100, 출처: 각사 웹>휴머노이드를 포함한 다양한 보행로봇도 그런 면에서 모바일 로봇의 일종이며 하늘을 날아 이동 가능한 드론, 무인항공기(UAV, Unmanned Aerial Vehicle) 등의 항공로봇과 자율수중차량(AUddV, Autome, Automev)을 이용하여 이동 가능한 드론, Autome, Un)을 이용하여 로봇으로봇으로봇으로봇을 이용합니다.
문헌상 최초의 모바일 로봇으로 언급되는 것은 앞서 언급한 희석신화의 대장장이 신 헤파이스토스가 만들었다는 움직이는 삼각대이며, 실물로서의 모바일 로봇은 1948년 영국의 신경생리학자 월터 그레이가 자율적으로 이동하는 로봇 거북이를 만든 이래 존스 홉킨스 대학의 비스트, SRI의 쉐이크 등으로 큰 발전을 이루어 왔습니다.
1952년 클로드 샤논이 미로를 탐색하는 기계마우스 테세우스를 선보인 이래 국내에서도 1980년대 공과대생들이 취미로 Z80 등 8비트 마이크로프로세서를 사용하여 일정한 트랙을 따라 움직이는 마이크로마우스 붐이 일어나 1983년 제1회 마이크로마우스 대회가 개최되었습니다.
로봇 거북이나 모양 키와 마이크로 마우스는 비슷해 보이지만 기본적인 차이도 가지고 있습니다. 이들의 가장 큰 차이점은 로봇거북은 이동 중 장애물을 만나면 장애물을 피해 다른 경로로 계속 이동하는 반면 마이크로마우스는 바닥에 표시된 경로만을 이동하기 때문에 경로상에 장애물이 놓일 경우 더 이상 이동할 수 없다는 점입니다.

다양한 AGV 형태, 출처 : ssi-S chaferweb > 이러한 차이를 기준으로 모바일 로봇을 무인 운반차, AGV(Automated Guided Vehicle)와 자율주행 로봇, AMR(Autonomous Mobile Robot)로 구분합니다. 실은, 이러한 종류의 차량이나 로봇을 부르는 용어로 AGV나 AMR 외에도 IMR, LGV, SGV, UGV, ACC등이 사용되기도 합니다.
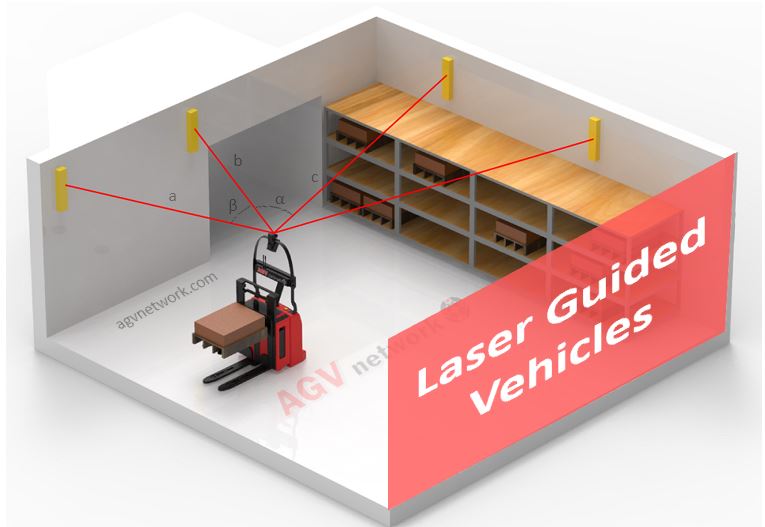
IMR(Industrial Mobile Robot)은 모바일 로봇 중 산업현장에서 사용되는 로봇을 가리키며, LGV(Laser Guided Vehicle)는 AGV 종류 중 레이저에 의해 유도되는 AGV를 가리키며, SGV(Self-Guided Vehicle)와 모바일 조작인 AGV(Unmannmanned Guided Cuided Vehicle), 그리고 모든 로봇이 아닌 AGuided Vehicle 등이 사용된다.
물류 현장 등 활용 용도가 유사하게 겹치는 부분이 많아, AMR 를 AGV 의 일방향 또는 하위 집합으로 보는 경우도 있어, 한층 더 동일하게 취급하는 경우도 있습니다. 사실 AGV의 일종인 LGV와 같이 유도경로 설치 없이 이동경로가 보다 유연할 경우 AMR과 큰 차이가 없어 보입니다.

LGV의 작동 방식, 출처 : agvn etwork.com > 그러나 발전 과정을 살펴보면 AGV와 AMR은 다른 과정을 겪게 되면 개발되고 둘 다 이동이라는 기능적 유사점이 있는데 AGV가 같은 위치에서 다른 위치로 이동하는 이동성에 중점을 둔 반면 AMR은 주변 환경을 인식하고 인식한 환경에 따라 반응할 수 있는 탐색 기술과 적응성으로 인해 큰 관심을 가지고 있습니다.
물론 둘 다 크게는 모바일 로봇이라는 범주에 속하기 때문에 엄밀하게는 AGV에 속하는 아마존의 기바(KIVA)를 물류 로봇이라고 부르지만 AMR이라고 하지 않습니다.
AGV는 형태적으로 거의 AMR과 비슷하여 운전자 없이 자동으로 이동할 수 있기 때문에 이 두 모바일 로봇 사이에 혼동이 생길 수 있습니다.
그러나 미리 제공된 맵이나 이동하면서 스스로 주변 환경지도를 작성하는 기술인 SLAM(Simultaneous Localization and Mapping)으로 작성된 맵을 바탕으로 카메라, 라이더(LiDAR), 레이저 스캐너 등으로 주변 환경을 감지하여 경로를 탐색하여 경로를 탐색하고 이동경로상의 장애물을 자율적으로 회피하여 이동하는 AGV는 바닥과 천장해석 등을 통해 주변 환경을 감지하고, 즉, 레이저 스캐너 등으로만 이동경로를 통해 경로를 탐색하여 이동경로상의 장애물에 부착된 경로로 이동경로들을 자율적으로 차단하고 이동시켜주는 AGV의해 주는 AGGV의해 주는 기능상 장애
따라서 AGV를 활용하기 위해서는 AGV가 이동하는 경로에 맞추어 선을 깔거나 색을 칠하거나 바코드를 부착하는 등의 작업이 필요하고, AGV가 이동하는 경로가 변경되는 경우는 바닥 또는 이동 안내선등의 시설의 재작업이 필요합니다만, AMR 는 경로 변경에 수반하는 시설의 재작업은 필요 없습니다.
AMR에 비해 기술적, 비용적 난이도가 높지 않은 AGV는 정형화된 기존 제조시설에서의 이송 및 물류 모델에 적합한 반면, AMR은 이동경로 변경이 잦은 현장에서 유연성과 민첩성이 요구되는 이송 및 물류 모델에 적합합니다.
<AGV와 AMR의 차이를 전철과 택시에 비유한 사진 출처 : Mobile Robot Guide Web>
과거의 제조 현장은, 거의 좌우가 막힌 미로등의 경로를 이동하거나 마루의 전선, 마커등을 따라서 이동하는 AGV를 활용했지만, 기술의 발전에 따라 AGV도 이동 가능한 경로내에서 스스로 최적화 경로를 생성하면서 작업을 실시하는 것이 가능했습니다.
그러나 여전히 AGV는 작업자와 공간이 분리되어야 하며, 정형적 방법으로 운용되어 제조 공정 및 설비, 환경 변경 시 재투자 비용이 발생하였으나, 제조 현장의 스마트화로 정해진 경로가 아닌 자유롭게 이동할 수 있으며, 공간 문제를 해결할 수 있으며, 적응형 주행 경로 및 장애물 회피 운용 기능이 있는 AMR 도입이 점차 증가하고 있습니다.
다음의 로봇 관련 포스팅부터는 아마존 로봇의 종류, 모바일 로봇 산업계에 미친 영향, 아마존이 꿈꾸는 미래의 로봇들을 포스팅해 봅니다.