#마이크로비트 #코딩 #메이커교육 #맥퀸 #피지컬컴퓨팅 #초등학생
안녕하세요 오늘은 맥퀸으로 자율주행차를 만들어보겠습니다. 마크인은 마이크로비트를 코딩하여 조종할 수 있는 자동차입니다. 기본적으로 거리 감지 센서, 라인 트레이싱, LED 등이 탑재되어 있어 다양한 형태로 코딩을 할 수 있습니다. 나는 초등학교 4학년을 대상으로 여러 학교에서 수업을 했는데, 그렇게 어렵지 않아서 학생들이 즐겁게 수업에 참여했습니다.
자율주행차는 운전자가 직접 조종하지 않고도 장애물을 감지하고 피할 수 있어야 하는데 맥퀸에 탑재된 거리 감지 센서를 이용해 장애물을 파악하고 장애물이 있으면 옆으로 피해갈 수 있도록 할 계획입니다.
지금부터 맥퀸으로 자율주행차를 만들어 보겠습니다.
준비물 자율주행차를 만들기 위해 필요한 준비물을 소개합니다.

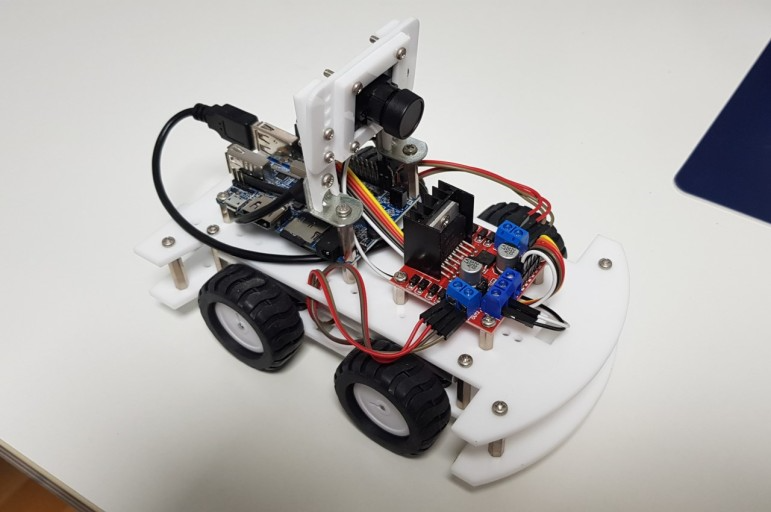



우선 맥퀸이 필요합니다. 마크인에는 순서대로 메인보드와 건전지, 초음파 센서, 바퀴와 타이어가 들어 있습니다. 그리고 마이크로비트가 필요한데 마이크로비트는 따로 구입해서 사용해야 합니다. 위의 부품을 모두 조립하면 아래와 같은 모습이 됩니다. 초등학교 4학년도 별도 지도할 필요 없이 조립이 가능할 정도로 간단합니다.
지금부터는 코딩을 해보도록 하겠습니다. 첫째, 맥퀸이 단순히 앞으로 나아갈 수 있는 코딩을 해보고 싶습니다.
먼저 맥퀸을 코딩하려면 맥퀸을 설치해야 합니다.

위에 보이는 마이크로비트 메인 화면에서 확장 메뉴를 클릭합니다.

그러면 위와 같은 화면으로 넘어가는데 빨간색으로 표시된 맥퀸을 클릭하면 앞으로 맥퀸을 코딩할 수 있게 됩니다.
마크인이 앞으로 나아갈 수 있도록 코딩하는 방법은 다음과 같습니다.

위에서 사용한 녹색 블록은 바퀴의 모터를 움직이는 블록입니다. 왼쪽과 오른쪽 바퀴가 모두 움직여야 해서 블록을 2개 사용하고 속도는 가장 빠르게 설정했습니다.
코딩할 결과를 다운로드하여 맥퀸을 작동시키면 아래와 같이 움직입니다.
이번에는 앞으로 나아가고 옆으로 회전했다가 다시 앞으로 가도록 코딩해 보겠습니다. 마크인에는 기본적으로 회전 블록이 없습니다. 따라서 전방 블록의 속도를 조절하여 횡회전시켜야 합니다. 만약 오른쪽 바퀴는 굴러가고 있는데 왼쪽 바퀴는 넘어지지 않으면 차는 왼쪽으로 회전합니다. 반대 상황이라면 오른쪽으로 회전합니다. 이러한 원리를 이용하여 아래와 같이 코딩할 수 있습니다.

일시정지 블록을 넣는 이유는 앞으로 나아가는 것을 1초만 보여주기 위해서입니다. 일시정지 블록 뒤로 앞으로 나아가는 블록을 2개 넣고 왼쪽 바퀴를 회전시키는 블록의 속도를 0으로 설정합니다. 그러면 차는 왼쪽으로 회전합니다.
왼쪽으로 회전하는 시간도 일시정지 블록을 이용해 1초만 회전하도록 했습니다. 그리고 또 앞으로 가는 블록을 사이에 두고 회전 후에 다시 앞으로 가도록 했습니다. 이렇게 코딩을 한 후에 다운로드하여 맥퀸을 작동시키면 아래와 같이 작동합니다.
이제 본격적으로 앞에 장애물이 있으면 횡회전했다가 다시 앞으로 나아가는 자율주행차를 코딩해 보겠습니다.
먼저 조건문을 넣고 앞의 장애물이 10cm 안쪽에 있으면 옆으로 회전하고, 그렇지 않으면 앞으로 나아가도록 코딩해 보겠습니다. 그리고 회전할 때는 LED에 불이 들어와 경고음이 발생합니다.
위와 같이 조건문을 넣고 장애물이 10cm 이내일 경우 설정합니다.
그리고 조건문 안에는 앞으로 나아갈 블록을 2개 가져와 왼쪽 바퀴 블록은 속도를 0으로, 오른쪽 바퀴 블록은 속도를 최대로 바꿔줍니다.
그리고 LED 블록을 2개 가지고 와서 왼쪽과 오른쪽에 각각 불을 붙입니다.
이번에는 문을 출력하도록 했고, 박자는 1/2박자로 조금 더 빠르게 설정했어요. 마지막으로 일시정지 블록을 추가한 이유는 위의 이 과정을 0.7초 정도만 실행하도록 하여 맥퀸이 계속 회전하지 못하도록 했기 때문입니다. 0.7초는 경험상 적당할 것 같아서 이렇게 설정했는데 맥퀸 제품에 따라 다를 수 있으니 직접 실험해보시고 설정하시는 것이 좋습니다.
이번에는 장애물이 10cm 밖에 있을 때를 코딩해 보겠습니다.
먼저 조건문 아래쪽에 +표를 눌러서 혹은 실행 부분을 생성하고 앞으로 나아가는 블록을 2개 추가해서 왼쪽과 오른쪽의 속도를 최대로 했습니다.
그리고 LED 블록을 2개 가져와 오른쪽과 왼쪽 LED를 모두 끕니다. 그러면 자율주행 코딩이 완성됩니다. 완성된 코드는 다음과 같습니다.
다음은 위 코드로 코딩한 맥퀸 작동 영상입니다.
지금까지 맥퀸의 간단한 조작방법과 맥퀸으로 장애물을 피하는 자율주행차를 만들어봤습니다. 초등학교 4학년 대상으로 했을 때 반응이 꽤 좋았는데 시간이 걸린 것 같습니다. 초등학교 고학년이나 중학생을 대상으로 한다면 시간을 조금 단축시켜 즐겁게 수업할 수 있을 것 같습니다.
감사합니다。